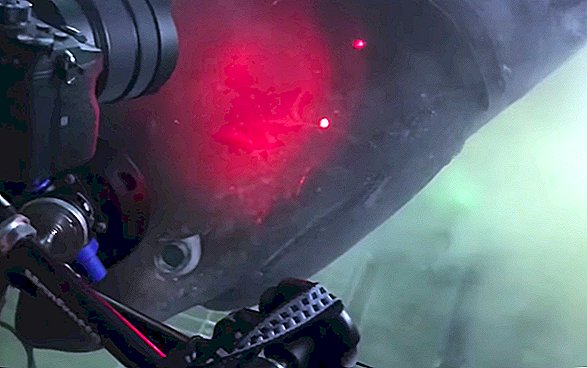
מכון וודס הול אוקיאנוגרפיה (WHOI) אומר שהרובוט התת ימי שלהם השלים בדיוק את פעולת הדגימה האוטומטית הראשונה אי פעם. הרובוט נקרא Nereid Under Ice (NEI) והוא אסף את הדגימה ביוון. WHOI מפתחת את Nereid בשיתוף עם תוכנית המדע והטכנולוגיה הפלנטרית של נאס"א מתוכנית מחקר אנלוגי (PSTAR).
ה- NUI הוא מעט קטן יותר ממכונית חכמה, ומשקלו כ- 1800 ק"ג (3960 פאונד.) והוא מבצע עבודות מדעיות חשובות כאן בכדור הארץ. במשימת החודש שעבר היא אספה דגימה מהר הגעש קולומבו, הר געש פעיל מתחת למים ליד אי סנטוריני היווני. חלק מרצפת המכתש הוא שדה של פתחי אוורור הידרותרמיים המכוסים במזרן חיידקים עבה. מדגם ה- NUI שנאסף ישמש לחקר חיי המיקרוביום.
"אחת המטרות שלנו הייתה להשליך את הג'ויסטיק והצלחנו לעשות זאת".
קמילי עשיר, מדען חבר WHOI, מוביל פיתוח טכנולוגיות אוטומציה
הפיתוח של NUI נובע מהדרישות של משימות עתידיות לכמה מהירחים במערכת השמש שלנו, כמו אירופה וגנימד, שיש להם אוקיינוסים מתחת לפני השטח. בחינת העולמות הללו תידרש סוג חדש של רובוט שיכול לעבוד באופן אוטונומי מתחת למים, ולא להסתובב על פני השטח.
קמילי העשיר הוא מדען עמיתי ב- WHOI המוביל את פיתוח טכנולוגיית האוטומציה כחלק מתוכנית המחקר הבינתחומי של PSA- NASA, המחקר והטכנולוגיה של נאס"א. בהודעה לעיתונות אמר קמילי, "עבור רכב שייקח מדגם מבלי שטייס ייסע זה היה צעד ענק קדימה. אחת המטרות שלנו הייתה להשליך את הג'ויסטיק והצלחנו לעשות את זה בדיוק. "

עם כניסתם של מכוניות בנהיגה עצמית, אנו מתרגלים לרעיון של כלי רכב אוטומטיים. אך הסביבה התת-מימית שונה בהרבה - ומסוכנת בהרבה - מדרך סלולה. פיתוח אינטליגנציה מלאכותית מספיק חזקה לסביבה זו הוא אתגר. קמילי היה חלק מצוות חוקרים בינלאומי שחקר את החיים בקולומבו, סביבה עשירה כימית. אבל קמילי גם היה שם כדי ללמוד יותר על איך רובוטים אוטונומיים יכולים לחקור סביבות מתחת למים.
הבינה המלאכותית של NUI כוללת מתכנן תוכנה בשם "ספוק". Spock מאפשר ל- NUI לא רק לקחת דגימות באופן אוטונומי, אלא גם לבחור את האתרים הטובים ביותר עבור אותם דגימות. על ירח מרוחק, באוקיאנוס מתחת לפני האדמה, יהיה צורך בסוג AI מתקדם זה.
"אם יש לנו החזון המפואר הזה של שליחת רובוטים למקומות כמו אירופה ואנצ'אלדוס, הם בסופו של דבר יצטרכו לעבוד בצורה עצמאית כזו וללא סיוע של טייס."
גדעון בילינגס, אוניברסיטת מישיגן
גדעון בילינגס הוא סטודנט אורח מאוניברסיטת מישיגן שמחקרי התזה שלו מתמקדים בטכנולוגיות אוטומטיות. הקוד של חיובים שימש לאיסוף הדגימה הראשונה הזו. הוא הוציא פקודה יחידה למניפולטור האוטונומי של NUI, וה- NUI עשה את השאר. תוך רגעים, NUI האריך את זרועו הרובוטית והשתמש במדגם צינור slurp כדי למצוץ קצת חומר.
בילינגס מבין שכל משימה לחקור את האוקיינוסים שמתחת לפני השטח של ירחים כמו אירופה תדרוש טכנולוגיות מתקדמות במיוחד, כולל AI מתוחכם. "אם יש לנו החזון המפואר הזה של שליחת רובוטים למקומות כמו אירופה ואנצ'אלדוס [ירחי יופיטר ושבתאי, בהתאמה], הם בסופו של דבר יצטרכו לעבוד בצורה עצמאית כזו וללא סיוע של טייס," הוא אומר.

זה יכול לקחת 35 דקות עד שאות רדיו תגיע ליופיטר מכדור הארץ, כך שתקשורת קדימה ואחורה תימשך יותר משעה. זה קריטי שרובוטי חקר יכולים "לחשוב" לעצמם לפרקי זמן, להשלים משימות ולהימנע מפגעים. כדי להשיג יעדים אלה, בילינגס ואחרים ימשיכו לעבוד על ה- AI. מטרתם היא "לאמן" רובוטים לראות כמו טייסים של ROV (כלי רכב המופעלים מרחוק) עם טכנולוגיית "מעקב אחר מבט". הם גם רוצים לבנות שפת ממשק אנושית-מכונה חזקה כך שמדענים יוכלו לדבר ישירות עם הרכב הרובוטי, ללא צורך בפיילוט לתרגם פקודות.
החזון נועד לקבוצה של ROVs כמו Nereid Under Ice לעבוד יחד.
"בסופו של דבר אנו יכולים לראות רשת של רובוטים אוקיינוסים קוגניטיביים שיש אינטליגנציה משותפת המשתרעת על פני צי שלם, כשכל רכב עובד בשיתוף פעולה כמו דבורים בכוורת", אומר קמילי. "זה יעבור הרבה מעבר לאיבוד הג'ויסטיק."
NUI נמצא בפיתוח מזה מספר שנים. זה נבדק באזור הארקטי, שם הוא נסע תחת הקרח ואסף נתונים על אזור ההתחממות. NUI הצליח לנסוע רחוק יותר מתחת לקרח מאשר כל רכב קודם.
NUI מסוגל לנסוע עד 40 ק"מ (25 מייל) לרוחב מתחת למים, הרבה יותר רחוק מכמה מאות מטרים האופייניים למנועי ROV אחרים. כאשר הוא מחובר באמצעות כבל סיב אופטי דק, הוא יכול לשדר וידאו בחדות גבוהה לספינת האם שלה. הוא כולל חבילה מלאה של חיישנים אקוסטיים, כימיים וביולוגיים, וזרוע מניפולטור עם שבע פונקציות. זה יכול לצלול עד לעומק של 2,000 מטר.
יותר:
- הודעה לעיתונות: הרובוט התת-ימי של WHOI לוקח מדגם אוטומטי ידוע ראשון מהאוקיאנוס
- WHOI: HROVNereid Under Ice
- מגזין החלל: נהגי רובר מימיים נוהגים על קרקעית הקרח באנטארקטיקה