צוות משולב של מהנדסים אמריקאים וקנדים עשה צעד ראשון משמעותי קדימה על ידי יישום מוצלח של מחקר רובוטיקה חדש מסוגו הראשון שנערך על סיפון תחנת החלל הבינלאומית (ISS) לתיקון ולתדלוק בסופו של דבר של לווייני חלל בעלי ערך גבוה. ואשר יש פוטנציאל שיום אחד להביא לחיסכון של מיליארדי דולרים למגזר הממשלתי והמרחב המסחרי.
חוקרים שמחים משתי המדינות צעקו "כן !!!" - לאחר שהשתמשו בהצלחה בניסוי Robotic Refueling Mission (RRM) - הוחלף מחוץ ל- ISS - כמיטת בדיקות טכנולוגית כדי להדגים שרובוט בשליטה מרחוק בוואקום של החלל יכול לבצע משימות עבודה עדינות הדורשות בקרת תנועה מדויקת במיוחד. ניסוי הרובוטיקה המהפכני יכול היה להאריך את חיי ההפעלה השימושיים של לוויינים שכבר במסלול כדור הארץ שמעולם לא נועדו לעבוד עליהם.
"לאחר שהקדשתי חודשים ארוכים של זמן מקצועי ואישי ל- RRM, זה היה מהומה רגשית גדולה והבטחה עבורי לראות את זרם הווידיאו הראשון מכלי RRM," אמר ג'סטין קאסידי בראיון בלעדי לעומק עם מגזין החלל. קאסידי הוא מנהל חומרה RRM במרכז זרימת החלל של נאס"א גודארד בגרינבלט, מרילנד.

וצוות RRM כבר מתכנן לבצע מעקב שאפתני עוד יותר אחר ניסויים החל מהקיץ הקרוב, כולל העברת נוזלים צפויה מאוד כדי לדמות תדלוק לוויין בפועל שיכול להמיר יישומי רובוטיקה בחלל - ראו פרטים בהמשך!
כל הפעולות הרובוטיות בתחנה נשלטו מרחוק על ידי בקרי טיסה מהקרקע. מטרת השלט הרחוק והרובוטיקה היא לשחרר את צוות האנוש של ISS, כך שיוכלו לעבוד על פעילויות חשובות אחרות ולבצע ניסויים מדעיים המחייבים מחשבה והתערבות אנושית באתר.

במהלך תקופה של שלושה ימים מה -7 עד ה- 9 במרץ, מהנדסים ביצעו פעולות משותפות בין הניסוי הרובוטי לתדלוק הרובוטים של נאס"א (RRM) והניסוי הרובוטי של סוכנות החלל הקנדית (CSA) - רובוט הדקסטרה. דקסטר מכונה רשמית SPDM או מניפולטור מיוחד המיועד.
ביום הראשון, מפעילי הרובוטים בכדור הארץ תמרו מרחוק את ה"שיפוצניק "באורך 12 מטר (3.7 מטר) לניסוי RRM תוך שימוש בזרוע הרובוטית הבנויה של תחנת החלל (SSRMS).
"היד" של דקסטרה - הידועה טכנית בשם "OTCM" - אחזה ובחנה שלושה כלי עבודה לווייניים מיוחדים שונים ששוכנו בתוך יחידת ה- RRM. הערכות מכניות וחשמליות מקיפות של כלי כובע הבטיחות, כלי חותך החוטים ושמיכת השמיכה וכלי המשולב מצאו כי שלושת הכלים מתפקדים בצורה מושלמת.

"הצוותים שלנו הצמידו באופן מכני את" היד "של הרובוט ה"קסטר" הקנדי על כלי ה- RRM Safety Cap Tool (SCT). ה- RRM SCT הוא היחיד במסלול ההיסטורי שמשתמש ביכולת הווידיאו של יד ה- Dextre OTCM, "הסביר קאסידי.
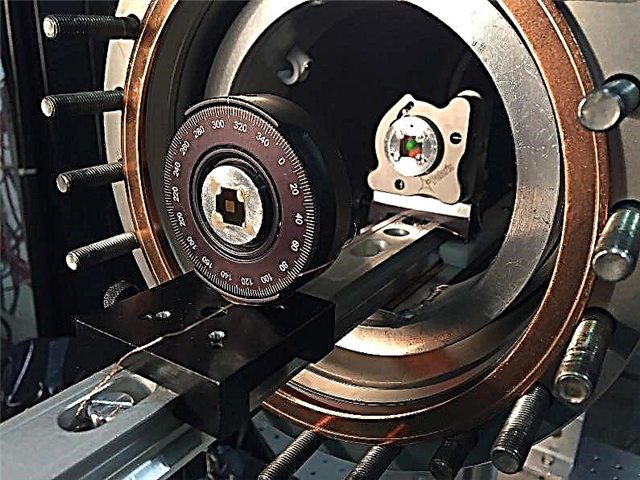
"בתחילת פעולות הכלים, בקרי המשימה הניעו מכנית את הטבור החשמלי של OTCM כדי להזדווג אותו עם תיבת האלקטרוניקה האינטגרלית של SCT. כאשר הכוח הופעל על הממשק הזה הצוות שלנו יכול היה לראות שבטלוויזיות המסך הגדולות של גודארד - הסרטון "האור הראשון" של SCT הראה צילום של הכלי בתוך מפרץ האולם RRM (ראו תמונה).

"הצוות שלנו פרץ בצעקה מתוך" כן! " כדי לשבח את התשלום המצליח במערכת החשמל הזו. "
לאחר מכן ביצע דקסטר משימות שונות שמטרתן לבדוק עד כמה ניתן לטפל במגוון אביזרי גז, שסתומים, חוטים ואטמים ייצוגיים שנמצאים בחלק החיצוני של מודול ה- RRM. היא שחררה מנעולי שיגור בטיחות וחתכה בקפידה שני חוטי נעילה לווייניים דקיקים במיוחד - עשויים פלדה - ומדידה של 20 אלף סנטימטרים בלבד בקוטר.
"אירוע חיתוך התיל היה משך דקות ספורות. אך שתי המשימות לחיתוך תיל נדרשו כשיש שעות של פעולות רובוטיות מתואמות ובטוחות. חוט המנעול הנותב, מעוות וקשור על האדמה בממשק של כובע הסביבה וה- T-Valve לפני הטיסה, "אמר קאסידי.
תרגיל RRM זה מייצג את הפעם הראשונה בה נעשה שימוש ברובוט Dextre לצורך פרויקט מחקר ופיתוח טכנולוגי ב- ISS, הרחבה משמעותית של יכולותיו מעבר לאלו של תחזוקה רובוטית של המאחז המסיבי.
כיתוב וידיאו: המשימה לתדלוק רובוטי של דקסטרה: יום 2. היום השני של המשימה התובענית ביותר של דקסטר, שנעטף בהצלחה ב -8 במרץ, 2012 כאשר שיפוצניק הרובוטי סיים את שלוש המשימות שהוקצו לו. אשראי: NASA / CSA

בסך הכל שלושת ימי הפעילות ארכו כ- 43 שעות והתקדמו מעט מהר מהצפוי מכיוון שהם היו קרובים לשמש ככל שניתן היה לצפות.
"ימים 1 ו -2 התנהלו כ -18 שעות," אמר צ'ארלס בייקון, מהנדס מערכות הובלה / מערכות מערכות RRM ב- NASA Goddard, ל- Space Magazine. "יום 3 נמשך כשבע שעות מאז שסיימנו את כל המשימות מוקדם. כל שלושת הימים התבססו על 18 שעות, כאשר הצוות עבד בשתי משמרות. אז הזמן היה כצפוי, ולמעשה מעט טוב יותר מאז שסיימנו מוקדם ביום האחרון. "

"במשך מספר החודשים האחרונים הצוות שלנו שם את הבמה להפגנות RRM במסלול", אמר לי קאסידי. "ממש כמו הפקת תיאטרון, יש לנו מהנדסים רבים שמאחורי הקלעים שסיפקו תמיכה בפיתוח וממשיכים להיות חלק מפעילות ה- RRM במסלול."
"בכל שלב של RRM - החל מהכנה, אספקה, התקנה ועכשיו לביצוע הפעולות - אני נדהם מהמאמצים האדירים שרבים מהצוותים השונים תרמו כדי לגרום ל- RRM לקרות. משרד יכולות שירות הלוויין במרכז הטיסה לחלל גודארד של נאס"א, פעל בשיתוף עם מרכז החלל ג'ונסון, מרכז החלל קנדי (KSC), מרכז טיסת החלל מרשל ומרכז הבקרה של סוכנות החלל הקנדית בסנט הוברט, קוויבק כדי להפוך את RRM למציאות. "
"ההצלחה של פעולות RRM עד כה בתחנת החלל הבינלאומית (ISS) באמצעות דקסטרה היא עדות למצויינותם של ארגונים ושותפים רבים של נאס"א," הסביר קאסידי.
שלושת הימים "משימת הסרת אבזרי גז" הייתה הדמיה ראשונית לתרגול טכניקות חיוניות לתיקון רובוטים של לווינים תקינים ולתדלוק לוויינים הפועלים באופן אחר על מנת להאריך בתקווה להאריך את חיי הביצועים שלהם למשך מספר שנים.
טכנאים מבוססי קרקע משתמשים באביזרים ושסתומים כדי לטעון את כל הנוזלים, הגזים והדלקים החיוניים למכלי האחסון של לוויינים לפני השיגור ואחר כך הם אטומים, מכוסים ובדרך כלל לא ניגשים אליהם שוב.
"לא ניתן להפריז בהשפעתה של תחנת החלל כמיטת בדיקה טכנולוגית שימושית", אומר פרנק ספולינה, מנהל חבר במשרד יכולות שירות לוויינים (SSCO) במרכז הטיסה לחלל גודארד של נאס"א בגרינבלד.
"טכנולוגיות שירות לוויני רענן יודגמו בסביבת חלל אמיתית תוך חודשים במקום שנים. זה ענק. זה מייצג התקדמות אמיתית בקידום טכנולוגיות החלל. "
ארבעה ניסויי RRM עתידיים נוספים שנקבעו באופן פרשני לשנה זו, ידגימו את יכולתו של רובוט בשליטה מרחוק להסיר חסמים ולתדלק מיכלי גז לווייניים ריקים בחלל ובכך לחסוך חומרה יקרה מהצטרפותם בטרם עת לחצר הגרוטאות.
העיתוי של פעולות RRM עתידיות יכול להיות מאתגר ותלוי בזמינותם של Dextre וזרוע ה- SSRMS המוזמנות מאוד גם עבור פעולות רבות אחרות של ISS מתמשכות כמו שבילי חלל, פעילויות תחזוקה וניסויים מדעיים, כמו גם לינה ו / או פריקה קבועה של יציבות זרם של מטענים קריטיים מספקים מחדש ספינות כמו Progress, ATV, HTV, Dragon ו- Cygnus.
גמישות היא המפתח לכל פעולות ISS. ואף על פי שצוות התחנה אינו מעורב ב- RRM, יכול להיות שפעילותן תהיה.
"בעוד שהצוות עצמו לא סומך על דקסטר בפעולותיהם, אופסט של דקסטר יכול להשפיע בעקיפין על מה שהצוות יכול או לא יכול לעשות," אמר לי בייקון. "לדוגמה, במהלך פעולות ה- RRM שלנו הצוות לא יכול לבצע פעילויות מסוימות של פעילות גופנית בגלל התנועה הזו יכולה להשפיע על התנועה של דקסטר."
להלן רשימה של פעולות RRM הבאות - מגבלות לוח הזמנים של ISS בהמתנה:
* תדלוק (קיץ 2012) - לאחר שדקסטרה יפתח שסתום דלק הדומה לאלה המשמשים כיום בלוויינים, הוא יעביר אליו אתנול נוזלי דרך צינור תדלוק רובוטי מתוחכם.
* מניפולציה של שמיכה תרמית (TBD 2012) - Dextre יתאמן בחיתוך קלטת שמיכה תרמית וקיפול שמיכה תרמית לאחור כדי לחשוף את התוכן שמתחתיה.
הסרת בורג (אטב) (TBD 2012) - דקסטר יפרק ברובוטים ברגים (מחברים).
* הסרת מכסה חשמלי (TBD 2012) - דקסטר יסיר את הכיסויים שבדרך כלל יכסו את כלי החשמל של הלוויין.
RRM הועבר למסלול בתוך מפרץ המטען של מעבורת החלל אטלנטיס במהלך יולי 2011 במשימת המעבורת הסופית (STS-135) של תוכנית המעבורות הארוכה של נאס"א במשך שלוש עשורים, ואז הותקן על פלטפורמת עבודה חיצונית מסבך עמוד השדרה של ISS על ידי אסטרונאוטים שהסתובבו בחלל. הפרויקט הוא מאמץ משותף בין נאס"א ל- CSA.
"זה מה שכולו ההצלחה. עם RRM, אנו באמת סוללים את הדרך לחקירה רובוטית עתידית ושירותי לוויין ", סיכם קאסידי.

…….
24 במרץ (שבת): הרצאה חופשית מאת קן קרמר באגודה האסטרונומית של ניו ג'רזי, פארק מדינת פרהייס, ניו ג'רזי בשעה 830 בערב. נושא: אטלנטיס, תוכנית הסעות סוף אמריקה, RRM, אוריון, SpaceX, CST-100 ועתיד טיס החלל האנושי והרובוטי של נאס"א.