אנו חיים בעולם בו מתרחשות מהפכות טכנולוגיות מרובות בו זמנית. בעוד הקפיצות שמתרחשות בתחומי המחשוב, הרובוטיקה והביוטכנולוגיה זוכות לתשומת לב רבה, פחות תשומת לב מוקדשת לתחום שמבטיח לא פחות. זה יהיה תחום הייצור, שבו טכנולוגיות כמו הדפסת תלת מימד ורובוטים אוטונומיים מתבררות כמחלף משחק ענק.
לדוגמה, יש את העבודה שמנהל המרכז של ביטקולים אטומים (MBA) של MIT. כאן עובדים הסטודנטים לתארים מתקדמים בנימין ג'נט ופרופסור ניל גרשנפלד (במסגרת עבודת הדוקטורט של ג'נט) על רובוטים זעירים המסוגלים להרכיב מבנים שלמים. לעבודה זו יכולות להיות השלכות על כל דבר, החל מטוסים ומבנים ועד יישובים בחלל.
עבודתם מתוארת במחקר שהופיע לאחרונה בגיליון אוקטובר של הספר IEEE רובוטיקה ומכתבי אוטומציה. את המחקר כתבו ג'נט וגרשנפלד, אליהם הצטרפו סטודנטים לתארים מתקדמים אמירה עבדל-רחמן וקנת צ'אונג - בוגרת MIT ו- CBA שעובדת כיום במרכז המחקר של אמס של נאס"א.
כפי שהסביר Gerensheld במהדורת MIT News שפורסמה לאחרונה, היו מבחינה היסטורית שתי קטגוריות רחבות של רובוטיקה. מצד אחד, יש לך רובוטיקה יקרה של רכיבים מותאמים אישית המותאמים ליישומים מסוימים. מצד שני, יש כאלה העשויים ממודולים המופקים בהמונים לא יקרים עם ביצועים נמוכים יותר.
הרובוטים שעובדי צוות ה- CBA עובדים עליהם - שג'נט כינה את ה- Explorer Bipedal Isotropic Lattice Locomoting Explorer (BILL-E, כמו WALL-E) - מייצגים ענף חדש לחלוטין של הרובוטיקה. מצד אחד, הם הרבה יותר פשוטים ממגוון הרובוטים היקר, המותאם אישית והמאופטימיזציה. מצד שני, הם מסוגלים הרבה יותר מרובוטים המיוצרים בהמונים ויכולים לבנות מגוון רחב יותר של מבנים.
בלב הרעיון הוא הרעיון שניתן להרכיב מבנים גדולים יותר על ידי שילוב של חלקים תלת-ממדיים קטנים יותר - אותם מכנה צוות ה- CBA "ווקסלים". רכיבים אלה מורכבים מתלים וצמתים פשוטים וניתן להדק אותם בקלות בעזרת מערכות נעילה פשוטות. מכיוון שהם בעיקר שטח ריק, הם בעלי משקל קל אך עדיין ניתן לסדר אותם לחלוקת עומסים ביעילות.
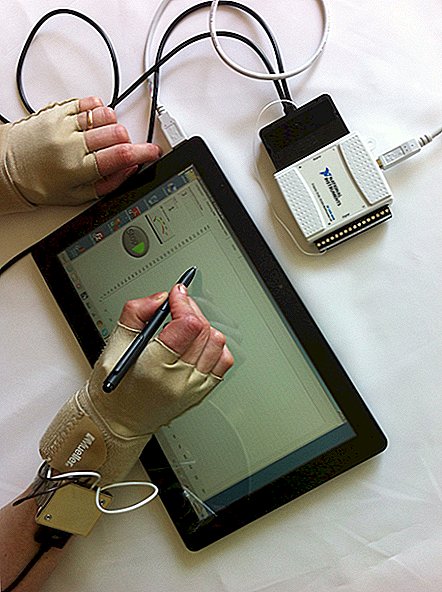
הרובוטים, בינתיים, דומים לזרוע קטנה עם שני קטעים ארוכים הצירים באמצע עם מתקן הידוק בכל קצה בו הם משתמשים כדי לאחוז במבני הווקסל. תוספות אלה מאפשרות לרובוטים להסתובב כמו תולעי אינץ ', לפתוח ולסגור את גופם כדי לעבור ממקום למקום.
עם זאת, ההבדל העיקרי בין המאספים הללו לרובוטים המסורתיים הוא הקשר בין העובד הרובוטי לחומרים איתם הוא עובד. לדברי גרשפלד, אי אפשר להבחין בסוג חדש של רובוט זה מהמבנים שהם בונים מכיוון שהם עובדים יחד כמערכת. זה בולט במיוחד כשמדובר במערכת הניווט של הרובוטים.
כיום, רוב הרובוטים הניידים דורשים מערכת ניווט מדויקת ביותר כדי לעקוב אחר מיקומם, כמו GPS. עם זאת, הרובוטים המרכיבים החדשים צריכים לדעת רק היכן הם נמצאים ביחס לווקסלים (יחידות משנה קטנות שעליהן הם עובדים). כאשר הרכיב עובר לזו הבאה, הוא מתאים את תחושת המיקום שלו מחדש, ומשתמש בכל מה שהוא עובד בכדי להתמצא.
כל אחד מרובוטי ה- BILL-E מסוגל לספור את צעדיו, שבנוסף לניווט מאפשר לו לתקן כל שגיאה שהוא מבצע במהלך הדרך. יחד עם תוכנת בקרה שפותחה על ידי עבד-רחמן, תהליך פשוט זה יאפשר לנחילי BILL-Es לתאם את מאמציהם ולעבוד יחד, מה שיאיץ את תהליך ההרכבה. כמו שג'נט אמר:
"אנחנו לא מכניסים את הדיוק לרובוט; הדיוק נובע מהמבנה [כשהוא מקבל צורה בהדרגה]. זה שונה מכל שאר הרובוטים. זה רק צריך לדעת איפה הצעד הבא שלו. "

ג'נט ומקורביו בנו מספר גרסאות הוכחה לקונספט של המרכבים, יחד עם עיצובים ווקסל תואמים. עבודתם התקדמה עד לנקודה בה גרסאות אב-טיפוס מסוגלות להדגים את הרכבת אבני הווקסל למבנים ליניאריים, דו-ממדיים ותלת-ממדיים.
תהליך הרכבה מסוג זה כבר משך את העניין של נאס"א (שמשתפת פעולה עם MIT במחקר זה), וחברת התעופה ההולנדית איירבוס SE - אשר גם חסכה את המחקר. במקרה של נאס"א, טכנולוגיה זו תהווה יתרון למערכות ההרכבה הדיגיטליות ההסתגלות הדיגיטליות שלהן (ARMADAS), שהמחבר המשותף צ'ונג מוביל.
מטרת פרויקט זה היא לפתח את טכנולוגיות האוטומציה וההרכבה הרובוטית הנחוצות לפיתוח תשתיות בחלל העמוק - הכוללות בסיס ירחי ובתי גידול בחלל. בסביבות אלה, הרכבים הרובוטיים מציעים את היתרון בכך שהם מסוגלים להרכיב מבנים במהירות וביעילות רבה יותר. באופן דומה, הם יוכלו לבצע תיקונים, תחזוקה ושינוי בקלות.
"עבור תחנת חלל או בית גידול ירחי, הרובוטים האלה היו חיים על המבנה, מתחזקים ומתקנים אותו ללא הרף", אומר ג'נט. איחוד הרובוטים הללו יבטל את הצורך בשיגור מבנים גדולים שהורכבו מראש מכדור הארץ. בשילוב עם ייצור תוספים (הדפסת תלת מימד), הם גם יוכלו להשתמש במשאבים מקומיים כחומרי בניין (תהליך המכונה In-Situ Resource Utilization או ISRU).

סנדור פקטה הוא מנהל המכון למערכות הפעלה ורשתות מחשבים באוניברסיטה הטכנית בברונשוויג, גרמניה. בעתיד הוא מקווה להצטרף לצוות כדי לפתח עוד יותר את מערכות הבקרה. למרות שפיתוח רובוטים אלה עד כדי כך שהם יוכלו לבנות מבנים בחלל הוא אתגר משמעותי, היישומים שיכולים להיות להם הם אדירים. כמו שאמרה פקטה:
"רובוטים לא מתעייפים או משועממים, ושימוש ברובוטים מיניאטוריים נראה כמו הדרך היחידה לבצע את העבודה הקריטית הזו. העבודה המקורית והחכמה ביותר של בן ג'נט ומשתפי הפעולה עושה זינוק ענק לקראת בניית כנפי מטוס מתכווננות באופן דינאמי, מפרשי שמש אדירים או אפילו בתי גידול חלליים הניתנים להתאמה מחדש. "
אין ספק כי אם האנושות רוצה לחיות ברצף בכדור הארץ או לצאת לחלל, היא תצטרך להסתמך על טכנולוגיה מתקדמת למדי. כרגע, המבטיחים שבהם הם אלה המציעים דרכים חסכוניות לראות את הצרכים שלנו ולהרחיב את נוכחותנו ברחבי מערכת השמש.
מהבחינה הזו, מתקיני רובוטים כמו BILL-E לא יעזרו רק במסלול, על הירח או מעבר לו, אלא גם כאן על כדור הארץ. בשילוב דומה לטכנולוגיית הדפסת תלת מימד, קבוצות גדולות של מכלולים רובוטיים שתוכנתו לעבוד יחד יוכלו לספק דיור זול ומודולרי שיכול לעזור להביא לסיום משבר הדיור.
כמו תמיד, ניתן להקיש על חידושים טכנולוגיים המסייעים לקידום חקר החלל כדי להקל על החיים על כדור הארץ!